Loading...
Searching...
No Matches
compiled_plan.hpp File Reference
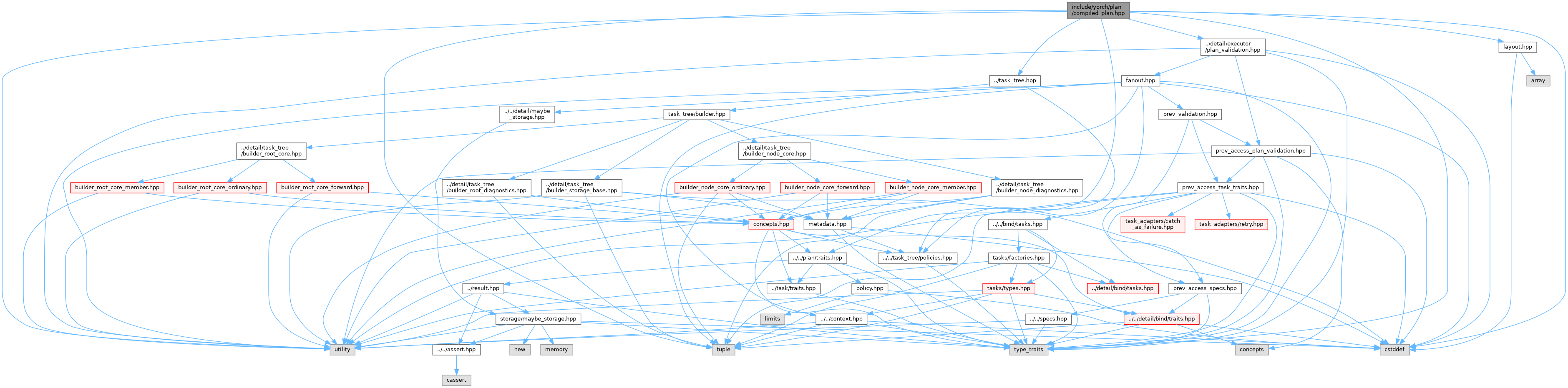
#include <cstddef>#include <tuple>#include <type_traits>#include <utility>#include "../detail/executor/plan_validation.hpp"#include "../task_tree.hpp"#include "layout.hpp"#include "traits.hpp"
Include dependency graph for compiled_plan.hpp:
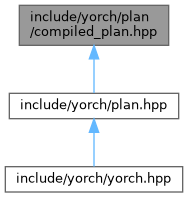
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | yorch::compiled_plan< Nodes > |
Static plan compiled from a task_tree_builder. More... | |
| struct | yorch::compiled_plan_from< task_tree_builder< Nodes... > > |
Maps a task_tree_builder type to its corresponding compiled plan type. More... | |
Namespaces | |
| namespace | yorch |
Typedefs | |
| template<typename Tree > | |
| using | yorch::compiled_plan_t = typename compiled_plan_from< std::remove_cvref_t< Tree > >::type |
| Convenience alias for the compiled plan type produced from a tree type. | |
Functions | |
| template<typename... Nodes> requires (sizeof...(Nodes) > 0) && detail::plannable_plan_nodes<Nodes...> | |
| constexpr auto | yorch::compile_plan (task_tree_builder< Nodes... > &&tree) |
Compiles a populated task_tree_builder into a static plan. | |
| template<typename... Nodes> requires (sizeof...(Nodes) > 0) && detail::plannable_plan_nodes<Nodes...> | |
| constexpr auto | yorch::compile_plan (const task_tree_builder< Nodes... > &tree) |